INARO formally announces Project Akran; Special announcement regarding Nikai M-2 Mission
The Ikhani National Aerospace Research Organization has, in a recent press conference, announced the existence of Project Akran, a series of spaceplanes which would allow for easier access to Low-Mundus Orbit at a significantly lower price than current spacecraft allow. The spacecraft has, at present, three primary variants planned, those being the Akran-OS (Orbital System; contains Crewed Orbiter and External Fuel Tank), Akran-CS (Cargo System; Cargo Variant with External Fuel Tank), and Akran-RS (Reusable System; Cargo variant SSTO; long-term plan), though it is anticipated that an advanced variant of the OS-variant will be built at some point. Documentation will be provided below:
The earliest form of the Akran system was proposed as early as 1993, though due to a lack of funding, it was dropped early on. However, in 2011, the Imperial Military expressed interest in a cheap, reliable vehicle to put its satellites in orbit, which led to the concept being revived. By 2015, INARO also expressed interest, though due to it being a military project it was kept largely classified from the general public. With military backing being removed in 2019, however, INARO has maintained its support for the project, citing the need to significantly reduce the cost of space transportation operations, as well as the spacecraft's increased efficiency, operational flexibility, and other advantages of the mobile launch from a carrier-plane.
Akran-OS with the Orbiter and External Fuel Tank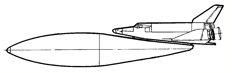
(Figure One: Akran-OS Second Stage)
The Akran-OS version is used for injection into an orbit and recovery to Mundus of small-scale and medium-scale payloads as well as performing a wide spectrum of missions at Low and Medium-Mundus Orbit. The typical flight-plan of the spacecraft is performed as follows:
- The Carrier-plane with the installed second stage takes off from it's basing airport and flies to a point above the surface, upon which it will launch the second stage. The geographic coordinates for the launch and the azimuth are determined by the mission's required orbital parameters. This task is completed by the carrier-plane with it's on-board fuel reserves. For longer flights, this task involves refueling the aircraft mid-flight through a military-owned RF-7 Altan.
- At the starting point, at approximately an altitude of 9 km, the carrier-plane makes it's pre-starting pull-up maneuver to provide the optimal combination of the initial trajectory parameters for the second stage: flight altitude, velocity and trajectory, and trajectory angle. Carrying out the pre-starting maneuver, the carrier-plane at first makes a shallow-descent, increasing its velocity before performing the pull-up maneuver with increasing trajectory angle and flight altitude. At this leg of the flight, the main propulsion unit of the second stage is started.
- When a required trajectory is reached, the separation process of carrier-plane and second stage starts. It consists of two phases:
- Quick reduction of the normal g-load down to a value of ny = -0.6 g. At this moment, breaking of mechanical connections between the carrier-plane and second stage appears;
- Collision-free separation of the carrier-plane and the second stage. During separation, the control of both the carrier-plane and the second stage ensures a safe distance between the carrier-plane surface and the rocket engine's jet flow.
- After separation, the second stage flies along the launch trajectory while the carrier-plane returns to horizontal flight, returning to the basing airport.
- When the second stage reaches a near orbital velocity, the main propulsion unit cuts off, the external fuel tank separates from the orbiter, descends and enters Mundus's atmosphere's dense layers, and burns up. The injection trajectory is picked so that unburned pieces of the fuel tank will fall into the ocean.
- The orbiter , after separation from the fuel tank, starts the orbital maneuvering system (OMS), achieving it's operational orbit and performing the major task of its mission.
- When the task is completed, the orbiter performs it's de-orbit retro maneuver by means of its orbital maneuvering system, enters the atmosphere and performs the full atmospheric controlled descent process before landing at it's main base airport. (Note: In emergencies or depending on the requirements of the mission, the aircraft can land at any sufficiently large and equipped airports.)
The main propulsion unit of the second stage consists of two
HK-701 tri-propellant engine produced by Kosit Aerospace. They use the following as propellant: Liquid hydrogen, liquid oxygen, and kerosene.
The main engines are installed on the orbiter and belong to reusable elements of the Akran system.
The fuel for the main propulsion unit is located in the external fuel tank and is supplied into the main engines through a plug-type connection. The external fuel tank consists of three separate tanks: in the front part liquid hydrogen tank, in the middle liquid oxygen tank, and rear part kerosene tank. The external fuel tank is fixed on the orbiter by three powerful connector assemblies with a pyrotechnic separation mechanism.
The Akran orbiter (figure 2) also has an orbital maneuvering system used for orbital flight and during the beginning of the descent into the top atmospheric layers. The orbital maneuvering system consists of two liquid orbital maneuvering thrusters and three engine units (nose, left and right at the rear) of the reaction control system (RCS).
Two OMS engines of 3,000 kg thrust each are used for the elliptic ascent, orbital transfers, and braking before descent.
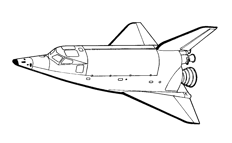
(Figure 2. The Akran Orbiter)
RCS includes 28 small liquid-fueled engines with 2, 5, and 40 kg thrust which provide angular control of the orbiter relative to the center of gravity and the plane-parallel motion during the mooring-and-docking maneuvers in orbit.
All RCS engines use pollution-free fuel: hydrogen peroxide and kerosene.
To control atmospheric flight, the orbiter has aerodynamic control surfaces: elevons, flap and rudder control, and air brakes.
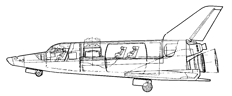
The Payload Bay (PLB) with folds is located in the middle part of the orbiter. The folds are opened up during flight in orbit. The injected and recovered payloads are placed in this payload bay. The basic manned version of the orbiter (Figure 3) has a cockpit for a two-pilot crew. The main overall dimensions of the orbital plane are: length 19.3 meters, wingspan 12.5 meters, height 8.6 meters.
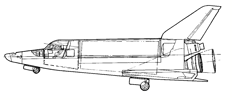
(Figure 3. Basic manned orbiter version)
There are some other versions of the orbiter for different tasks:
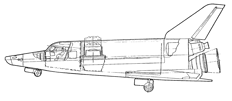
- unmanned orbiter (Figure 4.) for the insertion of payloads heavier than those for manned variants and for prolonged orbital flights including flights at higher altitudes;
- variant for Transport Maintenance Service (TMS) of orbital stations and unmanned platforms, as well as for emergency crew rescue from objects (launched unmanned, returns with crew of six)
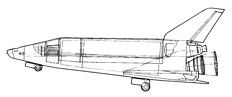
(FIgure 4. The unmanned orbiter)
There are two orbiter variants for the TMS missions. OSTMS-1 is used for transportation of relief crews and payloads into internal modules of orbital stations. They are transported in the pressurized module of the orbiter. To perform such actions, the payload bay is fitted with a docking port and a second pressurized cabin (figure 5.).
(Figure 5. OSTMS-1 Orbiter)
The Orbiter used for emergency crew rescue has a similar layout. Some differences are displayed in larger fuel reserves for higher mid-flight maneuverability.
The OSTMS-2 is used for the supplying of payloads equipment and assemblies installed on the outer surface of a space station (solar batteries, antennae, and other) in the cargo bay. It can also be used for supplying fuel and other liquids in tanks placed in the non-pressurized cargo bay (figure 6).
(Figure 6. The OSTMS-2 Orbiter)
Using various equipment located in the payload bay of the shown spacecraft allows the performance of a wide variety of missions.
INARO anticipates, thanks to previous work on the spacecraft over the last decade, that the spacecraft's unmanned variant could launch as soon as 2022, though it has not given any information on when the crewed variant will launch due to it wishing to test-fly the aforementioned variant first.
INARO has also stated that it is looking at flying the Mishei Emperor on the Nikai M-2 Mission coming up later this year. Due to his experience as a test pilot for the Imperial Air Forces, as well as
probably his position, many believe that this was a likely outcome, though some have questioned whether the Emperor has personally paid for this flight or if this is meant to bolster the state's image following the incident last December.


